Philip Schäfer
Entwicklungsingenieur
M.Sc. Entwicklung, Produktion und Management im Maschinenbau (TUM)
Willkommen in meinem Portfolio!
Hier erfahren Sie mehr über mich sowie meine Projekte.


VR-Prototyping
Entwicklung einer VR-Applikation zur Evaluierung von Fahrzeugkonzepten
Wenn von der Mobilität der Zukunft die Rede ist, wird häufig das Bild von autonomen, rein elektrisch betriebenen Fahrzeugen gezeichnet,
die intelligent und vollständig vernetzt ihre Passagiere befördern. Sollen solch neuartigen Fahrzeugkonzepte angenommen werden,
so muss deren Nutzerakzeptanz bereits in frühen Phasen der Fahrzeugentwicklung evaluiert werden.
VR-Prototyping ermöglicht es hierbei, Fahrzeugkonzepte samt ihres Funktionsumfangs detailgetreu sowie kostengünstig abzubilden.
Damit VR-Applikationen intuitiv zu bedienen sind, sollte der Einsatz von Eingabegeräten wie Controllern möglichst vermieden werden.
Im Rahmen der Masterthesis wurde daher ein VR-Konzept entwickelt, welches Storytelling in Verbindung mit Animationen nutzt,
um Fahrzeugkonzepte samt ihres Funktionsumfangs immersiv zu kommunizieren.
Hierbei kann der Nutzer das Fahrzeugkonzept mittels eines VR-Headsets betrachten,
während die Funktionalitäten des Fahrzeuges anhand einer strukturierten Geschichte (Storytelling) emotionalisiert kommuniziert werden.
Evaluierungsgegenstand der Arbeit war ein neuartiges Buskonzept,
welches einen integrierten Transport von Personen sowie Gütern zur Optimierung der Fahrzeugauslastung ermöglichen soll.
Zudem verwendet das Fahrzeugkonzept einen flexiblen Routing-Algorithmus,
um während Betriebszeiten mit geringer Auslastung auch Passagiere außerhalb der fixen Route abholen zu können.
Die VR-Applikation wurde zudem auf der Internationalen Automobil-Ausstellung (IAA) erprobt,
wobei innerhalb von zwei Tagen über 100 Probanden das Fahrzeugkonzept begutachteten.
Anschließend wurde mittels semistrukturierter Interviews die Haltung der Probanden gegenüber dem Fahrzeugkonzept erfasst,
um dessen Entwicklung noch nutzerzentrierter gestalten zu können.
Healthcare Innovation
Gamifizierung von Physio-Training mittels smarter IOT-Sensorplatte und Web-App
Rund jede zehnte Person in Deutschland leidet an einem Knick-Senk-Spreizfuß (Plattfuß). Dies kann nicht nur Schmerzen im Fuß hervorrufen, vielmehr gerät die Körperhaltung aus dem Gleichgewicht, was zu Schmerzen im Knie, der Hüfte sowie im Rücken führen kann.
Soll diese Problematik nachhaltig behoben werden, so führt kein Weg an einem Physio-Training zur Stärkung der Fußmuskulatur vorbei. Hier liegt jedoch das eigentliche Problem: Oftmals werden zwar von Physiotherapeuten Trainingseinheiten verordnet, jedoch werden diese oftmals zwecks mangelnder Motivation nicht durchgeführt! Wir wollen dies ändern, indem wir Physio-Training mittels unserer smarten Sensorplatte sowie Web-App gamifizieren!
Hierzu betritt der Patient die Sensorplatte, welche per Bluetooth mit der Web-App verbunden ist. Zunächst erklären Trainingsvideos die durchzuführenden Physio-Übungen, anschließend führt der Patient diese auf der Sensorplatte aus, wobei er mit seinen Bewegungen die in der Web-App integrierten Arcade-Games spielen kann. Zusätzlich motivieren Highscore-Boards sowie tägliche Erinnerungen den Patienten zum Training.

Softwaregestütztes Fluktuations-Risikomanagement
Identifizierung von Fluktuationsrisiken sowie gezielte Gegenmaßnahmen
Der demographische Wandel und der damit einhergehende Fachkräftemangel stellt viele produzierende Unternehmen vor große Herausforderungen.
So stellen unbesetzte Arbeitsplätze einen hohen Wertschöpfungsverlust für Unternehmen dar,
da sie ihre Güter und Waren aufgrund der reduzierten Arbeitskraft nicht im gewünschten Umfang produzieren können.
Somit rückt nicht nur die Anwerbung, sondern auch die Bindung von Fachkräften immer weiter in den Fokus von produzierenden Unternehmen,
um langfristig ihre Wettbewerbsfähigkeit zu sichern.
Um das Fluktuationsrisiko innerhalb eines Unternehmens senken zu können,
müssen zunächst die Fluktuations-Risikofaktoren der Belegschaft analysiert werden, um anschließend gezielte Gegenmaßnahmen einleiten zu können.
Hierzu wurde im Rahmen meiner Semesterarbeit eine Web-App entwickelt,
welche zunächst anhand eines anonymen sowie standardisierten Fragebogens das Fluktuationsrisiko der Belegschaft erfasst.
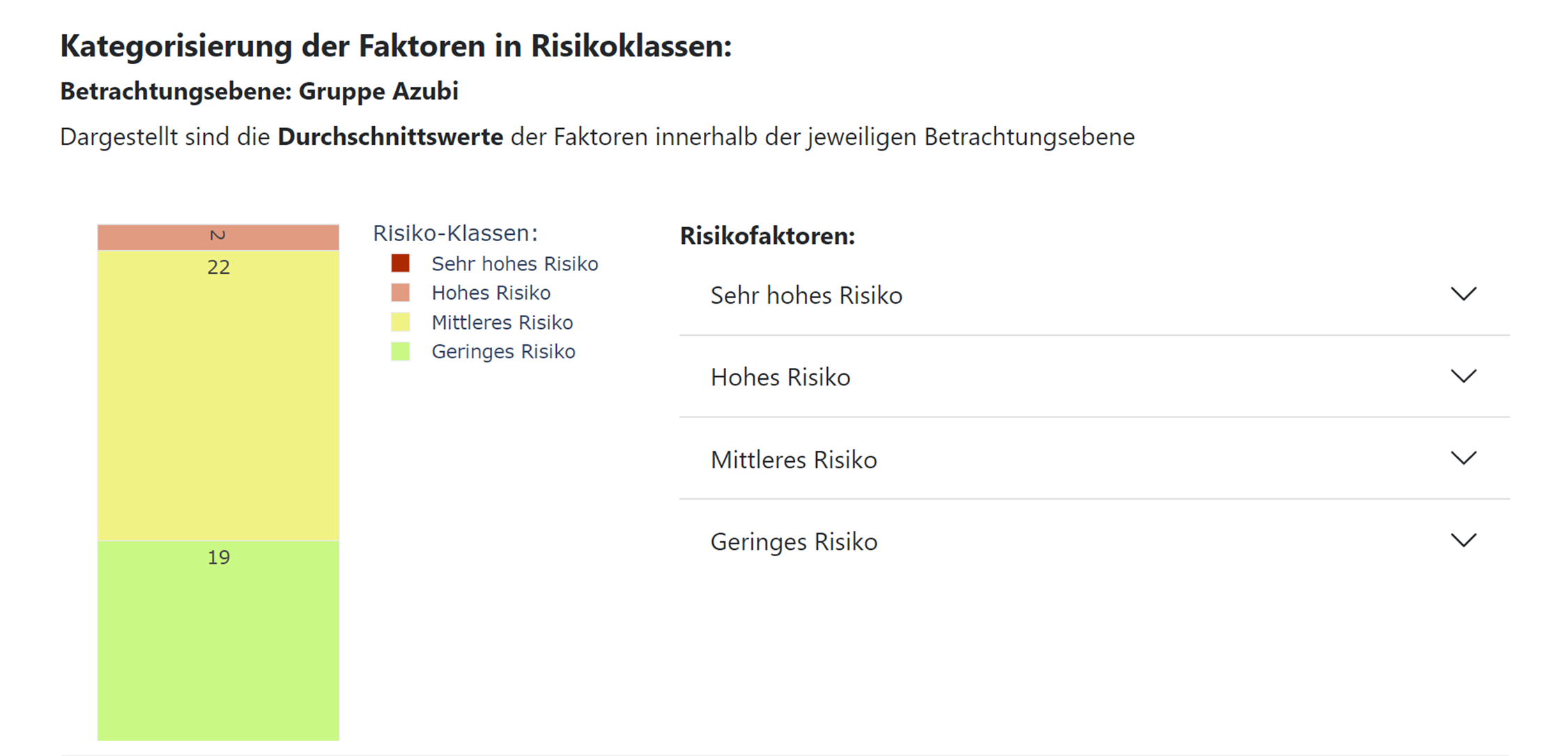
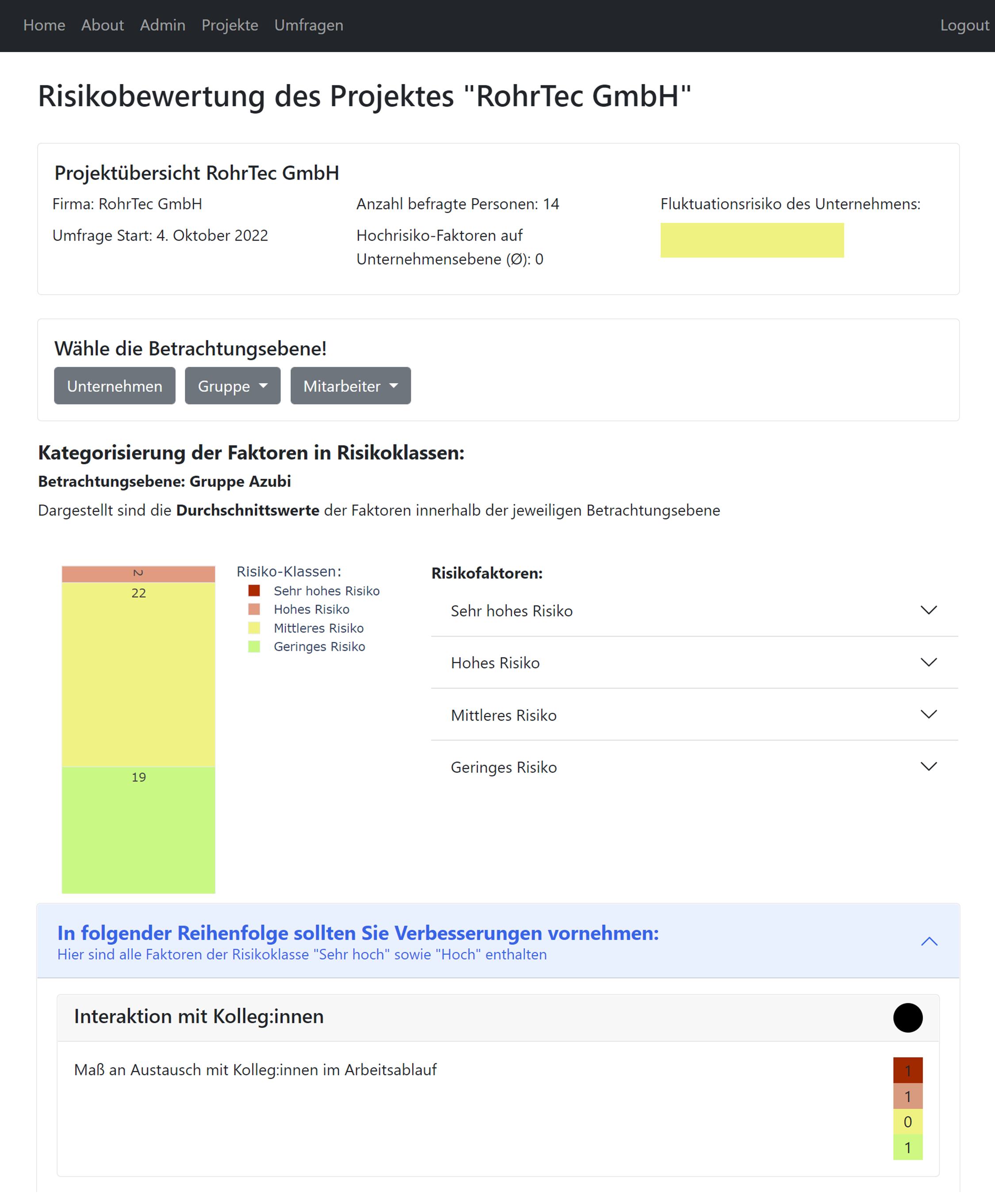
Anschließend kann mittels der Auswertungsmaske das Fluktuationsrisiko des Unternehmens,
einer Gruppe oder das eines einzelnen Mitarbeiters analysiert werden.
Neben der Anzeige des akuten Fluktuationsrisikos empfiehlt die Web-App zudem spezifische Gegenmaßnahmen mit dem Ziel, das Fluktuationsrisiko zu senken.
Die in dem Fragebogen erfassten Risikofaktoren sowie die zugehörigen Gegenmaßnahmen basieren auf einer umfassenden Literaturanalyse,
welche aus einer wissenschaftlichen Vorarbeit stammt.
Entwicklung eines Demontage-Assistenzsystems
Im Rahmen der Kreislaufwirtschaft gewinnt das Recycling von Produkten am Ende ihres Lebenszyklus zunehmend an Bedeutung.
Um die im Produkt verwendeten Rohstoffe möglichst sortenrein recyceln zu können, muss das Produkt in seine einzelnen Bestandteile zerlegt werden.
Heutzutage erfolgt die Demontage von Produkten häufig manuell,
was mit hohen Kosten verbunden ist und somit ein optimales Recycling oftmals unwirtschaftlich gestaltet.
Um das Recycling in Zukunft wirtschaftlicher zu gestalten, haben wir eine Toolchain entwickelt,
die sich in ein Demontage- und in ein Roboter-Programmier-Assistenzsystem gliedert.
Ziel der Toolchain ist es, die Planung von Demontageprozessen zu beschleunigen sowie zu automatisieren,
um die Kosten des Recyclings zu reduzieren.
Da die Grundlagen für das Demontage-Assistenzsystem mit meiner Bachelorarbeit gelegt wurden und ich dieses System
im Laufe meiner Tätigkeit als Hiwi am Fraunhofer IPA weiterentwickeln konnte, wird im Folgenden auf dieses eingegangen.
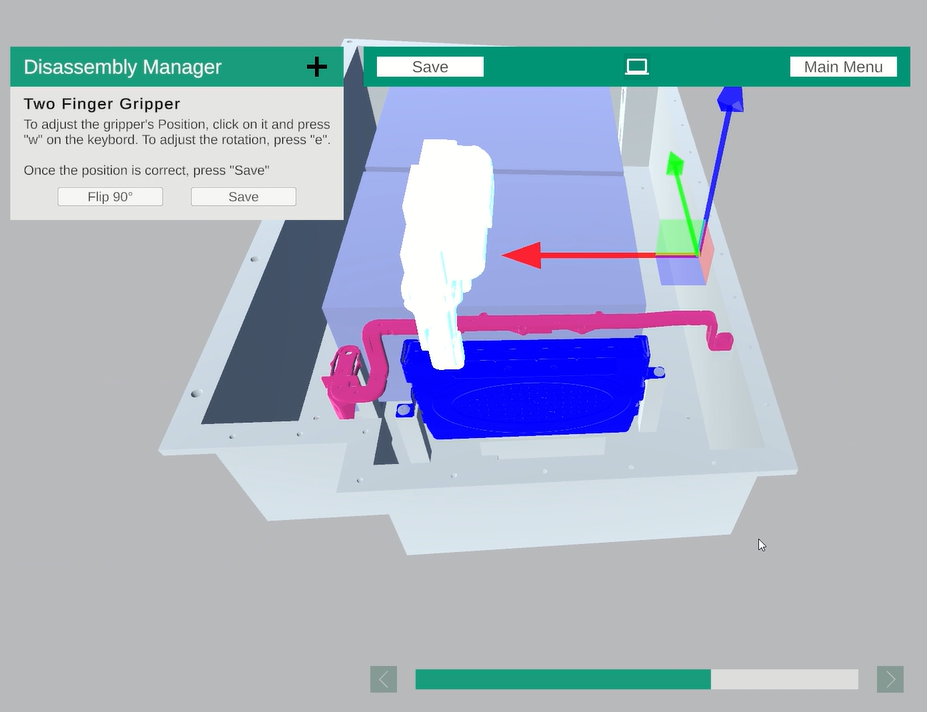
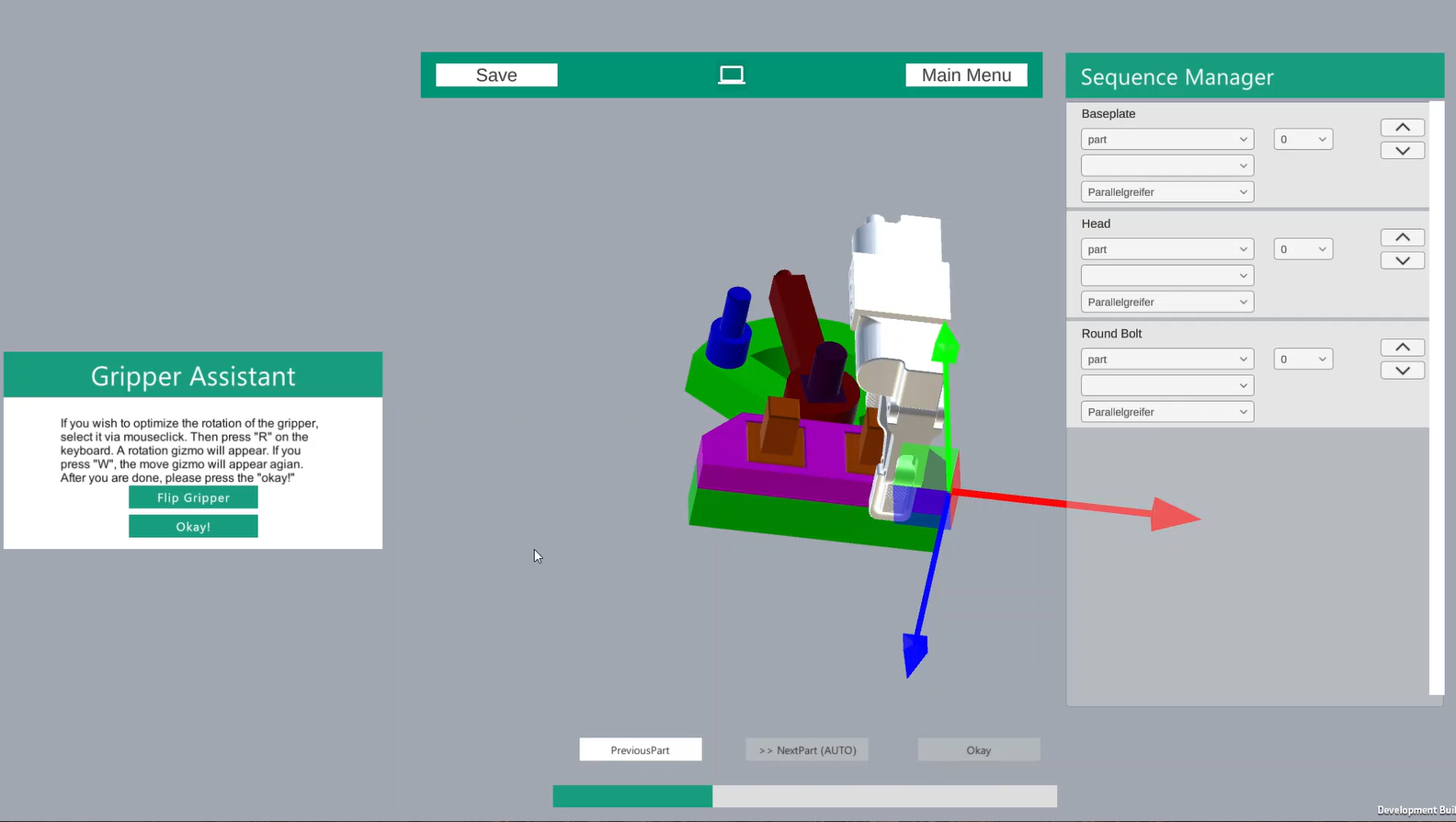
Das visuelle Demontage-Assistenzsystem ermöglicht zum einen die Generierung einer Demontagereihenfolge,
indem die importierte CAD-Baugruppe durch Verschieben der Bauteile stückweise demontiert wird.
Darüber hinaus werden die Bewegungspfade der Bauteile gespeichert, die anschließend in der Roboterbahnplanung verwendet werden.
Zudem können Greifpunkte für Roboter-Endeffektoren bestimmt werden, die auch für die Generierung des Robotercodes verwendet werden.
Weitere Informationen zu dem in der Bachelorarbeit entwickelten
(De-)Montage-Assistenzsystem
sowie der Toolchain zur Planung von Demontageprozessen
erhalten Sie durch Klicken der Links.